Loading...
Searching...
No Matches
osmscout::NavigationMessage Struct Reference
Base class for all navigation messages. More...
#include <Engine.h>
 Inheritance diagram for osmscout::NavigationMessage:
Inheritance diagram for osmscout::NavigationMessage: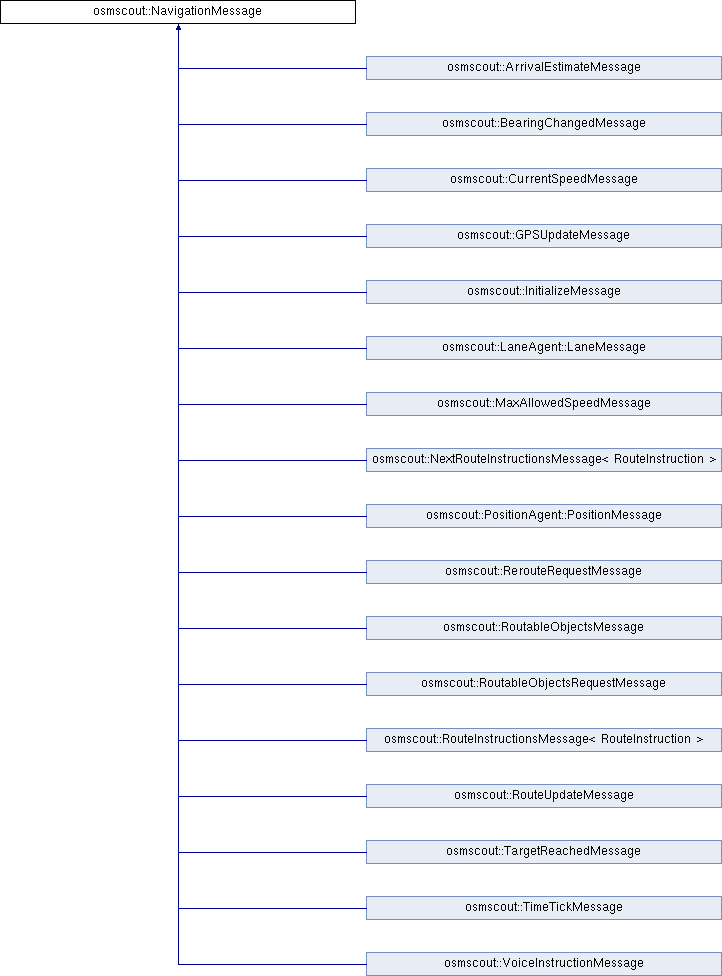
Public Member Functions | |
| NavigationMessage (const Timestamp ×tamp) | |
| virtual | ~NavigationMessage ()=default |
Public Attributes | |
| const Timestamp | timestamp |
Detailed Description
Base class for all navigation messages.
Messages that are send to the engine should named in presense tense (e.g. "GPSUpdate"). Messages that signal a change in the internal state should use past tense (e.g. "PositionChanged").
This way NavigationEngine::Process() should only get passed present tense named messages and should only return past tense named messages.
Constructor & Destructor Documentation
◆ NavigationMessage()
|
explicit |
◆ ~NavigationMessage()
|
virtualdefault |
Member Data Documentation
◆ timestamp
| const Timestamp osmscout::NavigationMessage::timestamp |
The documentation for this struct was generated from the following files: